下载链接
↑↑↑强烈推荐下载PDF
培训记录《人形机器人前沿技术培训班》
<div align=“right”>
<img src=“https://imgpool.protodrive.xyz/img/yank-note-picgo-img-20241105215145.png” alt=“Image Description” width=“190” />
</div>
:::::: row 个人信息
::::: col

:::::
::::: col
::: tip 张聿韬 / Male
:::
::::: col
::: col
Github:https://github.com/YuTaoV5
技术博客:https://yutaov5.github.io/
:::
:::: row 擅长领域
::: col 脑机接口
:::
::: col 机器人
:::
::: col 自动驾驶
:::
::::
欢迎各位老师与我交流~
如果有工作或博士Offer,请联系我要简历
:::::
::::::
:::: col 环境准备:Ubuntu20.04
::: tip Nvidia驱动相关
加入官方ppa源,根据自己的n卡可选驱动下载显卡驱动
sudo add-apt-repository ppa:graphics-drivers/ppa
sudo apt update
apt list --upgradable
sudo apt upgrade
ubuntu-drivers devices
sudo apt install nvidia-driver-535
CUDA
sudo apt install nvidia-cuda-toolkit
:::
::::
:::: col
::: tip Ros安装
wget http://fishros.com/install -O fishros && . fishros
:::
::: tip Miniconda下载
官网地址https://docs.anaconda.com/miniconda/install/#quick-command-line-install
mkdir -p ~/miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/miniconda3/miniconda.sh
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
rm ~/miniconda3/miniconda.sh
source ~/miniconda3/bin/activate
conda init --all
:::
友情提醒:请安装22.04版本直接选择重装系统,由于您很难在2204版本上面直接安装ROS1,使用Docker技术的话,由于X11显示服务,docker内的ROS1无法完整显示RVIZ等可视化应用
::::
:::: col Linux小技巧
::: col 命令行
| |
|---|
ctrl + alt + t | 唤出命令行 |
cmd->pwd | 返回当前目录路径 |
cmd->ls | 返回当前目录下所有文件及文件夹 |
cmd->cd .. | 返回上一级目录 |
cmd->cd xxx | 进入xxx文件夹 |
cmd->sudo gedit xxx | 超级权限用记事本编辑文件,如果您不熟悉vim |
:::
::: col 双系统同步时间
sudo apt install ntpdate
sudo ntpdate time.windows.com
sudo hwclock --localtime --systohc
:::
::::
:::: col
::: col 软件安装
| |
|---|
| deb安装包 | sudo dpkg -i linuxqq_3.1.2-13107_amd64.deb |
| setup.py安装包 | 终端输入pip instal -e . |
| .sh安装 {rowspan=2} | chmod +x install.sh |
| ./install.sh |
| 一键安装缺失依赖 | sudo apt -f install |
:::
::::
:::: col
::: col ROS项目编译
进入工作空间根目录
进入src文件夹,如果没有可以把现有文件移入src文件夹,再catkin_init_workspace一下
这一步会生成cmakelist
catkin_init_workspace
终端进入src上级文件夹,初始化工作空间
catkin_make
编译完配置环境变量source一下
source devel/setup.bash
然后就可以roslaunch了
::::
强化学习基础-机器人走迷宫
强化学习基本概念
强化学习是一种通过与环境的交互来学习实现目标的计算方法,主要涉及以下几个方面:
- 感知: 代理(Agent)通过观察环境来获取当前状态(State)。
- 行动: 代理选择一个动作(Action)来执行。
- 目标: 代理的目标是最大化累积奖励(Reward)。
关键概念总结
| 概念 | 描述 |
|---|
| 智能体(Agent) | 在环境中执行动作并学习的实体。 |
| 环境(Environment) | 代理所处的外部世界,提供状态和奖励。 |
| 状态(State) | 环境当前的情况,代理的观察输入。 |
| 动作(Action) | 代理在当前状态下可选择的行为。 |
| 奖励(Reward) | 环境对代理动作的反馈,用于指导学习。 |
| 策略(Policy) | 代理选择动作的规则,可以是确定性的或概率性的。 |
| Q值(Q-value) | 给定状态下采取某个动作的预期累计奖励。 |
Q-Learning算法基本原理
Q-Learning是一种无模型的强化学习算法,用于学习状态-动作值函数(Q函数)。其基本原理如下:
- Q表: 维护一个表格,记录所有状态-动作对的Q值。
- Q值更新公式:
$$
Q(s, a) \leftarrow Q(s, a) + \alpha \left[ r + \gamma \max_{a’} Q(s’, a’) - Q(s, a) \right]
$$
其中:
- $\alpha$ 是学习率,控制新知识和旧知识的权重。
- $r$ 是即时奖励。
- $\gamma$ 是折扣因子,控制未来奖励的权重。
- $s’$ 是下一步的状态。
- 算法步骤:
- 初始化Q表,所有Q值设为0。
- 代理在当前状态$s$选择一个动作$a$(通常使用ε-贪心策略)。
- 执行动作$a$,观察下一步状态$s’$和奖励$r$。
- 更新Q值,使用上述Q值更新公式。
- 设置$s = s’$,重复步骤2-4,直到达到终止条件。
Q-Learning的目标是通过不断迭代更新Q值,最终收敛到最优策略,使得代理在任何状态下都能选择最优动作,以最大化累积奖励。
实操记录:DQN算法部署
操作指南
::: col
创建环境
conda create -n DQN pyhton=3.8
conda activate DQN
pip install torch==2.0.0 torchvision==0.15.1 torchaudio==2.0.1 -i https://pypi.tuna.tsinghua.edu.cn/simple
pip install -r requirements.txt
将conda环境加入jupyter
python -m ipykernel install --user --name=DQN
启动jupyter
jupyter notebook
- 选择
main.ipynb进入,kernel选择DQN环境
- 逐步运行
main.ipynb
该项目代码注释相当详细,本文不再做过多注解,请直接参考注解
:::
照片记录
应用拓展:可视化Q-Learning走迷宫
[!IMPORTANT] Q-Learning-UI
参考所给例程,通过PyQt5设计UI界面,将部分参数可视化,支持重复运行,自动生成随机地图
::: col 使用方法
git clone https://github.com/YuTaoV5/DQN-ui.git
cd DQN-ui
conda activate DQN
pip install pyqt5
python main.py
:::
::: warning 运行效果

Disigned by YuTaov5
:::
仿生机器人强化学习中的DWL算法与Humanoid-Gym项目
算法与仿真的基本概念
DWL算法概念
DWL(Denoising World Model Learning) 是一种用于仿生机器人强化学习的先进算法,旨在通过去噪世界模型学习,提升机器人在复杂环境中的适应能力。其核心特点包括:
- 去噪机制:通过消除仿真环境与真实环境之间的噪声差异,缩小“仿真到现实”(Sim2Real)的差距。
- 端到端学习:利用单一神经网络实现从仿真到真实环境的零样本迁移,减少对复杂模型调整的需求。
- 鲁棒性与泛化能力:在多种复杂地形(如雪地、楼梯、不规则表面)中表现出稳定的运动能力,并能够抵抗外部干扰。
Humanoid-Gym开源项目
Humanoid-Gym 是一个基于NVIDIA Isaac Gym的强化学习框架,专门用于训练人形机器人的运动技能,并实现从仿真到真实环境的零样本迁移。其主要特点包括:
- 仿真到现实迁移:支持从仿真环境(如Isaac Gym)到真实环境的无缝迁移,验证策略的鲁棒性和泛化能力。
- 仿真到仿真支持:允许在Isaac Gym和Mujoco等仿真引擎之间进行策略迁移,进一步提升训练效率。
- 奖励函数设计:提供专门为人形机器人设计的奖励函数,简化训练过程。
- 多机器人支持:已在RobotEra的XBot-S(1.2米)和XBot-L(1.65米)人形机器人上成功验证。
仿真对于强化学习的重要性
仿真在强化学习中扮演着至关重要的角色,主要体现在以下几个方面:
- 低成本与高效率:仿真环境提供了低成本、高效率的训练平台,避免了真实环境中反复试错的高成本和风险。
- 可观测性与可控性:仿真环境允许研究人员完全控制实验条件,便于调试和优化算法。
- 复杂场景模拟:仿真可以模拟真实环境中难以复现的复杂场景(如极端地形、动态障碍物等),为算法提供多样化的训练数据。
仿真引擎对比及其优劣
以下是常用仿真引擎的对比及其优劣:
| 仿真引擎 | 优点 | 缺点 |
|---|
| Isaac Gym | - 高性能,支持大规模并行仿真<br>- 与NVIDIA硬件深度集成,计算效率高 | - 对硬件要求较高<br>- 学习曲线较陡峭 |
| Mujoco | - 物理仿真精度高<br>- 适合精细控制任务 | - 商业软件,需付费<br>- 计算效率较低 |
| Gazebo | - 开源免费<br>- 与ROS兼容性好,适合多机器人协同仿真 | - 图形渲染和物理仿真精度较低<br>- 对复杂场景支持有限 |
| PyBullet | - 开源免费<br>- 支持多种物理引擎,灵活性高 | - 物理仿真精度和稳定性不如Mujoco |
| Webots | - 用户友好,适合初学者<br>- 支持多种机器人模型和传感器仿真 | - 计算效率较低<br>- 对复杂场景的支持有限 |
总结
- DWL算法通过去噪机制和端到端学习,显著提升了仿生机器人在复杂环境中的适应能力。
- Humanoid-Gym项目为仿生机器人强化学习提供了高效的训练框架,支持从仿真到现实的零样本迁移。
- 仿真是强化学习的重要工具,不同仿真引擎各有优劣,需根据具体任务需求选择合适的平台。
实操记录:Humanoid-gym部署
操作指南
::: col
创建环境
conda create -n isaac pyhton=3.8
conda activate isaac
pip install torch==2.0.0 torchvision==0.15.1 torchaudio==2.0.1 -i https://pypi.tuna.tsinghua.edu.cn/simple
安装isaac
解压"IsaacGym_Preview_4_Package.tar.gz"
请确保终端此时在conda环境内
cd isaacgym/python && pip install -e .
测试isaac
cd examples && python 1080_balls_of_solitude.py
安装humanoid-gym项目
git clone https://github.com/roboterax/humanoid-gym.git
cd humanoid-gym && pip install -e .
如果git clone出现让你输入账号密码,你输入后他仍然报错拒绝访问的话,排除网络原因也可能因为是你的git版本太高了,git新版本规定要密钥登陆,旧版本没有这限制
:::
::: tip 训练,测试与移植
在4096个环境中启动’v1′的PPO策略训练
此命令启动基于PPO算法的人形机器人任务训练。
python scripts/train.py --task=humanoid_ppo --run_name v1 --headless --num_envs 4096
评估训练好的PPO策略’v1′
此命令加载’v1′策略以在其环境中评估性能。
cd humanoid
python scripts/play.py --task=humanoid_ppo --run_name v1
实施仿真到仿真模型转换
此命令使用导出的’v1′策略进行仿真到仿真转换。
python scripts/sim2sim.py --load_model /path/to/logs/XBot_ppo/exported/policies/policy_1.pt
运行训练好的策略
python scripts/sim2sim.py --load_model /path/to/logs/XBot_ppo/exported/policies/policy_example.pt
/path/to/logs是指您电脑上指向logs的绝对地址 如:
python humanoid/scripts/play.py –task=humanoid_ppo –load_run /home/yutaov5/Projs/humanoid-gym-main/logs/XBot_ppo/Jan14_21-01-39_v1 –run_name v1
训练好的默认模型储存在logs/{experiment_name}/exported/policies
:::
照片记录
应用拓展:移植宇树H1机器人到Hunmanoid-gym
[!IMPORTANT] 移植要点
在resources->robots文件夹里面添加H1的urdf文件夹
在humanoid->envs里面的__init__添加任务,修改如下:
::: col
from humanoid import LEGGED_GYM_ROOT_DIR, LEGGED_GYM_ENVS_DIR
from .base.legged_robot import LeggedRobot
from .custom.humanoid_config import XBotLCfg, XBotLCfgPPO
from .custom.humanoid_env import XBotLFreeEnv
from .custom.unitreeh1_config import Unitreeh1Cfg, Unitreeh1CfgPPO
from .custom.unitreeh1_env import Unitreeh1Env
from humanoid.utils.task_registry import task_registry
task_registry.register( “unitreeh1_ppo”, Unitreeh1Env, Unitreeh1Cfg(), Unitreeh1CfgPPO() )
task_registry.register( “humanoid_ppo”, XBotLFreeEnv, XBotLCfg(), XBotLCfgPPO() )
:::
[!IMPORTANT] 移植要点
在humanoid->envs->custom里面的仿照原任务复制添加两个文件:unitreeh1_config.py和unitreeh1_env.py,并修改相关参数
在humanoid->scripts里面的仿照原sim2sim.py文件复制添加一个sim2sim_h1.py文件,并修改相关参数
::: tip 运行指令
python scripts/train.py --task=unitreeh1_ppo --run_name v1 --headless --num_envs 1000
python humanoid/scripts/play.py --task=unitreeh1_ppo --load_run /home/yutaov5/Projs/humanoid-gym-main/logs/h1_ppo/Jan14_01-07-14_v1 --run_name v1
请注意指令相应地址替换成自己的路径
:::
::: warning 运行效果
:::
仿生机器人强化学习中的PPO算法与Unitree-RL-Gym项目
PPO算法概念
PPO(Proximal Policy Optimization) 是一种强化学习算法,旨在通过限制策略更新的幅度,保证训练的稳定性和效率。其核心思想是通过裁剪机制(Clipping Mechanism)限制策略更新的幅度,避免策略更新过大导致训练不稳定。PPO的主要特点包括:
- 稳定性:通过裁剪机制限制策略更新幅度,防止策略崩溃。
- 高效性:支持多次小批量更新,提高数据利用率。
- 普适性:适用于连续动作空间和高维状态空间,广泛应用于机器人控制、游戏AI等领域。
PPO的核心公式
PPO的目标函数如下:
$$
L^{CLIP}(\theta) = \mathbb{E}t \left[ \min(r_t(\theta) \hat{A}t, \text{clip}(r_t(\theta), 1-\epsilon, 1+\epsilon) \hat{A}_t) \right]
$$
其中:
- $r_t(\theta) = \frac{\pi\theta(a_t|s_t)}{\pi{\theta_{\text{old}}}(a_t|s_t)}$:新旧策略的概率比率。
- $\hat{A}_t$:优势函数,表示动作的相对优劣。
- $\epsilon$:裁剪阈值,通常设为0.1或0.2。
Unitree-RL-Gym开源项目
Unitree-RL-Gym 是宇树科技开源的强化学习框架,专注于仿生机器人(如四足机器人Go2、人形机器人H1)的运动控制。其特点包括:
- 支持多仿真引擎:包括NVIDIA Isaac Gym和MuJoCo,支持从仿真到真实环境的无缝迁移。
- 完整训练流程:提供从数据采集、模型训练到真机部署的全流程支持。
- 开源代码与教程:包含详细的代码和教程,帮助用户快速上手。
项目结构
unitree_rl_gym/
├── legged_gym/ # 核心代码
│ ├── scripts/ # 训练和测试脚本
│ ├── config/ # 配置文件
│ ├── resources/ # 机器人模型和资源
├── LICENSE # 开源许可证
├── README.md # 项目说明
├── setup.py # 安装脚本
实操记录 Unitree-rl-gym部署
操作指南
::: col 安装环境
conda create -n unitree python=3.8
conda activate unitree
pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simple
pip install torch==2.4.1 torchvision==0.19.1 torchaudio==2.4.1 -i https://pypi.tuna.tsinghua.edu.cn/simple
安装isaac
解压"IsaacGym_Preview_4_Package.tar.gz"
请确保终端此时在conda环境内
cd isaacgym/python && pip install -e .
测试isaac
cd examples && python 1080_balls_of_solitude.py
:::
::: col 下载项目
请回到主目录,不要在isaac目录里面下载新项目
git clone https://github.com/leggedrobotics/rsl_rl.git
cd rsl_rl
git checkout v1.0.2
pip install -e.
rsl_rl请注意使用git clone拉下来项目,不要去网站下载zip
git clone https://github.com/unitreerobotics/unitree_rl_gym.git
cd unitree_rl_gym
pip install -e.
git clone https://github.com/unitreerobotics/unitree_sdk2_python.git
cd unitree_sdk2_python
pip install -e.
:::
::: tip 运行项目
回到主目录,进入unitree_rl_gym文件夹
python legged_gym/scripts/train.py --task=h1 --run_name V1 --headless --num_envs 1000 --max_iterations=5000
python legged_gym/scripts/play.py --task=h1 --run_name v1
:::
照片记录
::: warning 运行效果
:::
需求驱动导航DDN
环境定位算法A-LOAM算法概念及其开源项目
A-LOAM算法
A-LOAM(Advanced Lidar Odometry and Mapping) 是一种基于激光雷达的3D SLAM算法,旨在通过高效的点云处理和优化技术,实现机器人的实时定位与建图。其核心特点包括:
- 特征提取:从激光雷达点云中提取边缘点(edge points)和平面点(planar points)作为特征点,用于位姿估计。
- 运动补偿:通过时间戳对齐和插值技术,消除激光雷达在运动过程中产生的点云畸变。
- 优化框架:使用Ceres库进行非线性优化,替代了传统LOAM算法中的手推高斯牛顿法,简化了代码实现并提高了可读性:cite[1]:cite[6]。
A-LOAM开源项目
A-LOAM 是一个开源的激光SLAM项目,基于ROS(Robot Operating System)框架开发,适用于自动驾驶、机器人导航等场景。其主要特点包括:
- 易用性:提供详细的安装和运行指南,适合初学者快速上手。
- 高效性:利用Ceres和PCL库,能够高效处理激光雷达数据,生成高质量的点云地图。
- 灵活性:支持多种运行模式,包括直接运行数据包和与机器人平台集成:cite[6]:cite[8]。
A-LOAM与Point-LIO、Fast-LIO的优劣比较
以下是A-LOAM、Point-LIO和Fast-LIO的对比:
| 特性 | A-LOAM | Point-LIO | Fast-LIO |
|---|
| 核心算法 | 基于特征点的优化方法,使用Ceres库进行非线性优化。 | 基于点云的优化方法,结合IMU数据进行高精度定位。 | 基于关键帧的优化方法,通过IMU预积分加速计算。 |
| 计算效率 | 较高,适合实时应用,但对大规模点云处理效率较低。 | 较低,计算复杂度高,适合高精度场景。 | 高,通过算法优化实现快速计算,适合实时性要求高的场景。 |
| 硬件要求 | 中等,依赖Ceres和PCL库,适合普通计算平台。 | 高,需要较强的计算资源处理大量点云数据。 | 低,优化后的算法对硬件要求较低,适合资源受限的设备。 |
| 精度与鲁棒性 | 较高,适合复杂环境下的定位与建图。 | 高,基于点云的优化方式在复杂环境下表现优秀。 | 较高,但在复杂环境中可能略逊于Point-LIO。 |
| 应用场景 | 自动驾驶、机器人导航、室内外定位。 | 精细化环境建图、高精度定位。 | 自动驾驶、机器人导航等实时性要求高的场景。 |
激光SLAM算法对人形机器人自主导航的重要性
激光SLAM算法在人形机器人自主导航中扮演着关键角色,主要体现在以下几个方面:
- 环境感知:激光雷达能够提供高精度的3D环境信息,帮助机器人实时感知周围环境,避免碰撞。
- 定位与建图:通过SLAM算法,机器人能够在未知环境中实现自主定位与建图,为路径规划和导航提供基础。
- 鲁棒性:激光SLAM对光照和纹理不敏感,适合复杂多变的动态环境,如家庭、商场等场景:cite[3]:cite[9]。
总结
- A-LOAM 是一种高效、易用的激光SLAM算法,适合初学者和实时应用场景。
- Point-LIO 和 Fast-LIO 分别在高精度和实时性方面具有优势,适合不同的应用需求。
- 激光SLAM 是人形机器人实现自主导航的核心技术,为其提供了高精度的环境感知和定位能力。
实操记录:A-LOAM部署
操作指南
:::: col
::: tip
Ros安装
wget http://fishros.com/install -O fishros && . fishros
:::
::: tip
下载ceres2.0.0
http://ceres-solver.org/ceres-solver-2.0.0.tar.gz
:::
::::
:::: col
安装依赖
sudo apt-get install liblapack-dev libsuitesparse-dev libcxsparse3 libgflags
dev libgoogle-glog-dev libgtest-dev
编译与安装ceres
cd ceres-solver
mkdir build && cd build
cmake ..
make -j
sudo make install
注意make -j表示全核心运行,若您是使用云主机,请切换为make -j4
切换为主目录
::::
:::: col 下载安装A-LOAM
如果你没有a_loam_ws文件夹
::: col
建立a_oam_ws文件夹,建立并进入src文件夹
这一步会生成cmakelist
cd a_loam_ws/src
git clone https://github.com/YuehaoHuang/A-LOAM.git
catkin_init_workspace
终端进入src上级文件夹,初始化工作空间
catkin_make
编译完配置环境变量source一下
source devel/setup.bash
然后就可以roslaunch了
:::
如果你有a_loam_ws文件夹,有==devel==等文件夹
::: col
cd a_loam_ws/src
git clone https://github.com/YuehaoHuang/A-LOAM.git
cd ../
catkin_make
请注意,之后每次roslaunch都需要source一下
::::
:::: tip 运行VLP-16
启动ROS
ctrl + alt + t 唤出终端,输入
roscore
ctrl + alt + t 唤出新终端,输入
cd a_loam_ws
source devel/setup.bash
roslaunch aloam_velodyne aloam_velodyne_VLP_16.launch
打开nsh_indoor_outdoor.bag所在文件夹,右键打开新终端,输入
rosbag play nsh_indoor_outdoor.bag
::::
课后作业
::: col

:::
请找到A-LOAM -> src -> kittiHelper.cpp这个文件,找到main函数,观察如下片段:
while (std::getline(timestamp_file, line) && ros::ok()) {
float timestamp = stof(line);
std::stringstream left_image_path, right_image_path;
left_image_path << dataset_folder
<< "sequences/" + sequence_number + "/image_0/"
<< std::setfill('0') << std::setw(6) << line_num << ".png";
cv::Mat left_image =
cv::imread(left_image_path.str(), cv::IMREAD_GRAYSCALE);
right_image_path << dataset_folder
<< “sequences/” + sequence_number + “/image_1/”
<< std::setfill(‘0’) << std::setw(6) << line_num << “.png”;
lidar_data_path << dataset_folder
<< "sequences/" + sequence_number + "/velodyne/"
<< std::setfill('0') << std::setw(6) << line_num << ".bin";
if (to_bag) {
bag_out.write("/image_left", ros::Time::now(), image_left_msg);
bag_out.write("/image_right", ros::Time::now(), image_right_msg);
bag_out.write("/velodyne_points", ros::Time::now(), laser_cloud_msg);
bag_out.write("/path_gt", ros::Time::now(), pathGT);
bag_out.write("/odometry_gt", ros::Time::now(), odomGT);
}
这就是3类文件的读取路径,所以选择保存`bag`后,他的路径就在下面这段代码,这样就好理解他的保存逻辑了,主要就在文件结构上
>请找到`A-LOAM` -> `launch` -> `kitti_helper.launch`修改如下:
``` c++
<launch>
<node name="kittiHelper" pkg="aloam_velodyne" type="kittiHelper" output="screen">
<param name="dataset_folder" type="string" value="/home/yutaov5/Proj/kitti_odometry/" />
<param name="sequence_number" type="string" value="00" />
<param name="to_bag" type="bool" value="true" />
<param name="output_bag_file" type="string" value="/home/yutaov5/Proj/kitti_odometry/kitti.bag" />
<param name="publish_delay" type="int" value="1" />
</node>
</launch>

然后我的kitti_odometry数据集的目录在/home/yutaov5/Proj/kitti_odometry/,我的文件结构如下
::: col
|kitti_odometry\
|——|sequences\
|————|00\
|———————|image_0\
|———————|image_1\
|———————|image_2\
|———————|image_3\
|———————|velodyne\
|———————|calib.txt
|———————|times.txt
:::
:::tip 运行指令
ctrl + alt + t 唤出新终端,输入
source devel/setup.bash
roslaunch aloam_velodyne aloam_velodyne_HDL_64.launch
roslaunch aloam_velodyne kitti_helper.launch
等待他结束即可~
:::
:::warning 运行截图

大概20G左右的bag
:::
ORCA算法概念与开源项目介绍
ORCA算法概念
ORCA(Optimal Reciprocal Collision Avoidance) 是一种用于多机器人动态避障的运动规划算法,旨在通过局部优化实现高效、无碰撞的路径规划。其核心思想是:
- 速度障碍法(Velocity Obstacle, VO):通过计算每个机器人的速度障碍区域,避免与其他机器人发生碰撞。
- 互惠性(Reciprocity):假设所有机器人均遵循相同的避障规则,通过共享避障责任,实现公平的避障行为。
- 优化目标:在满足动力学约束的前提下,选择最优速度,使机器人尽可能接近目标速度。
ORCA的核心公式
ORCA通过以下公式计算每个机器人的可行速度集合:
$$
\text{ORCA}_{A|B}\tau = { v | (v - v_A^{\text{opt}}) \cdot n \geq 0 }
$$
其中:
- $v_A^{\text{opt}}$:机器人A的最优速度。
- $n$:速度障碍区域的法向量。
- $\tau$:时间窗口,表示避障的时间范围。
ORCA开源项目
ORCA 是一个开源的动态避障算法实现,广泛应用于多机器人系统、自动驾驶和游戏AI等领域。其主要特点包括:
- 高效性:能够在实时环境中快速计算避障速度。
- 灵活性:支持多种机器人模型和运动学约束。
- 易用性:提供详细的文档和示例代码,适合快速集成到机器人系统中。
项目结构
::: col
gorca/
├─draw
├─examples
├─figs
├─rvo
├─前沿人形机器人仿真环境下轨迹规划算法研发与实践-1.16
├─.idea
└─.git
:::
环境安装比较简单
运行结果
::: tip
运行blocks_new.py
:::
PCA算法用于点云图像生成Demo3D项目
PCA算法概念
PCA(Principal Component Analysis,主成分分析) 是一种降维算法,通过线性变换将高维数据投影到低维空间,同时保留数据的主要特征。在点云图像生成中,PCA用于提取点云的主要方向(如法向量、主方向等),从而辅助三维感知和机器人抓取位姿估计。
PCA的核心步骤
- 中心化:将点云数据平移至原点,使其均值为零。
- 协方差矩阵:计算点云的协方差矩阵,描述点云在不同方向上的分布。
- 特征值分解:对协方差矩阵进行特征值分解,得到特征值和特征向量。
- 主成分提取:选择最大的特征值对应的特征向量作为点云的主方向。
PCA在点云图像生成中的应用
PCA在点云图像生成中的主要应用包括:
- 法向量估计:通过PCA提取点云的局部表面法向量,用于三维重建和表面分析。
- 主方向提取:通过PCA提取点云的主方向,用于物体位姿估计和机器人抓取规划。
- 降维与压缩:通过PCA将高维点云数据降维,减少计算复杂度。
PCA算法在三维感知与机器人抓取位姿估计中的重要性
PCA是三维感知和机器人抓取位姿估计的基本算法,主要体现在以下几个方面:
| 应用场景 | 描述 |
|---|
| 三维感知 | 通过PCA提取点云的主方向和法向量,辅助物体识别和环境建模。 |
| 抓取位姿估计 | 通过PCA提取物体的主方向,确定抓取点的位置和姿态。 |
| 点云降维 | 通过PCA将高维点云数据降维,减少计算复杂度,提高实时性。 |
| 点云压缩 | 通过PCA保留点云的主要特征,减少存储空间和传输带宽。 |
PCA算法的优势与局限性
以下是PCA算法在点云图像生成中的优势与局限性总结:
| 特性 | 描述 |
|---|
| 优势 | - 计算简单,易于实现<br>- 能够有效提取点云的主要特征<br>- 适合实时应用 |
| 局限性 | - 对噪声敏感,需预处理去噪<br>- 仅适用于线性数据分布<br>- 无法处理非线性结构 |
运行结果
::: tip
:::
LFG-NAV算法与多模态大模型GPT-4在视觉语言导航中的应用
LFG-NAV算法概念
LFG-NAV(Language-Guided Navigation) 是一种结合多模态大模型(如GPT-4)的视觉语言导航算法,旨在通过自然语言指令和视觉感知实现智能导航。其核心思想是:
- 多模态融合:将视觉信息(如图像、点云)与语言指令(如目标描述、路径规划)结合,生成导航策略。
- 思维链推理:通过大语言模型的推理能力,将复杂的导航任务分解为多个子任务,逐步生成导航策略。
- 启发式策略:将大语言模型的输出转化为规划过程中的启发式策略,而非直接执行其建议,从而提高导航的鲁棒性和适应性。
GPT-4在视觉语言导航中的作用
GPT-4 是一种多模态大语言模型,能够处理文本、图像等多种输入形式。在视觉语言导航中,GPT-4的作用包括:
- 指令理解:解析自然语言指令,理解用户需求。
- 任务分解:将复杂的导航任务分解为多个子任务,生成思维链。
- 策略生成:结合视觉感知信息,生成导航策略。
思维链推理在导航中的应用
思维链(Chain-of-Thought, CoT) 是一种通过逐步推理解决复杂问题的方法。在视觉语言导航中,思维链的作用包括:
- 任务分解:将导航任务分解为多个子任务(如目标识别、路径规划、避障等)。
- 推理引导:通过大语言模型的推理能力,逐步生成导航策略。
- 启发式策略:将大语言模型的输出转化为规划过程中的启发式策略,提高导航的鲁棒性。
LFG-NAV算法的优势与局限性
以下是LFG-NAV算法在视觉语言导航中的优势与局限性总结:
| 特性 | 描述 |
|---|
| 优势 | - 结合多模态信息,提高导航精度<br>- 通过思维链推理,增强策略的合理性<br>- 支持复杂环境下的智能导航 |
| 局限性 | - 对计算资源要求较高<br>- 依赖高质量的多模态数据<br>- 需要复杂的模型训练和调优 |
SolidWorks在机器人结构设计中的使用
SolidWorks简介
SolidWorks 是一款广泛应用于机械设计和工程的三维CAD软件,特别适合机器人结构设计。其核心功能包括:
- 参数化建模:通过参数驱动设计,快速修改和优化机器人结构。
- 装配体设计:支持多零件装配,模拟机器人运动学行为。
- 仿真与分析:提供运动学、动力学和有限元分析工具,验证设计的可行性。
SolidWorks在机器人结构设计中的使用操作要点
以下是SolidWorks在机器人结构设计中的关键操作步骤:
| 操作步骤 | 描述 |
|---|
| 1. 零件设计 | 使用草图工具绘制机器人零件的2D轮廓,通过拉伸、旋转等操作生成3D模型。 |
| 2. 装配体设计 | 将多个零件组装成完整的机器人结构,定义零件之间的约束关系(如配合、对齐)。 |
| 3. 运动学仿真 | 使用Motion Study工具模拟机器人运动,验证关节运动范围和运动学性能。 |
| 4. 有限元分析 | 使用Simulation工具进行应力、应变分析,确保结构强度和刚度满足要求。 |
| 5. 生成工程图 | 创建2D工程图,标注尺寸和公差,用于制造和装配。 |
结构设计对机器人运动控制的巨大影响
机器人结构设计直接影响其运动控制性能,主要体现在以下几个方面:
- 运动学性能:结构设计决定了机器人的关节类型、运动范围和自由度,影响运动规划的复杂性。
- 动力学性能:结构设计影响机器人的质量分布和惯性特性,决定其动态响应速度和稳定性。
- 精度与刚度:结构设计影响机器人的刚度和精度,决定其在高负载或高速运动中的表现。
- 能量效率:合理的结构设计可以减少能量损耗,提高机器人的续航能力。
生成URDF文件
URDF(Unified Robot Description Format) 是描述机器人模型的XML格式文件,用于ROS(Robot Operating System)中的仿真和控制。以下是使用SolidWorks生成URDF文件的步骤:
4.1 安装插件
- 安装SolidWorks到URDF导出插件(
sw_urdf_exporter)。
4.2 导出URDF文件
- 定义关节和连杆:在SolidWorks中为每个关节和连杆添加参考坐标系。
- 设置运动学参数:定义关节类型(如旋转、平移)和运动范围。
- 导出URDF:使用插件将装配体导出为URDF文件,包含机器人的几何、运动学和视觉信息。
作业展示
课堂作业
::: col
:::
家庭作业
::: tip 关键设计考虑
运动学分析: 该关节结构具有3个自由度,确保运动范围和精度满足要求。
负载能力: 考虑关节结构的负载能力,选择合适的结构。
装配孔设计: 除了预留电机安装螺孔外,还设计了多个3mm的装配孔,方便与其他部件连接。
结构优化: 通过优化结构设计,减小关节结构的重量和体积,提高运动灵活性。
:::
结构展示以及3D打印
:::: col
::: col关节联结展示,参考的灵犀肩关节以及对比
:::
::: col 3D打印软件Bambu Lab
本设计为一个3电机关节结构,参考==灵犀机器人==肩关节设计,具有类似的运动模式和结构特点,并预留了电机安装螺孔和其他装配孔。该关节结构由三个电机和两个连接件组成,能够实现多自由度运动。
:::
::: tip 文件分享
https://a360.co/4gWmcGL
:::
::::
导纳控制在机械臂控制中的应用与优势
导纳控制概念
导纳控制(Admittance Control) 是一种基于力-位置关系的控制方法,通过调整机械臂的动态响应特性,使其能够适应外部力的作用。其核心思想是:
- 力-位置映射:将外部力(如接触力)转化为位置或速度调整,实现柔顺控制。
- 动态响应调节:通过调整导纳参数(如质量、阻尼、刚度),控制机械臂的动态行为。
导纳控制在机械臂控制中的应用
导纳控制广泛应用于机械臂的柔顺控制和人机交互场景,主要包括以下应用:
- 力控操作:在装配、打磨等任务中,通过导纳控制实现精确的力控制。
- 人机协作:在协作机器人中,通过导纳控制实现安全的人机交互。
- 环境适应:在未知环境中,通过导纳控制实现机械臂的自适应运动。
导纳控制的优势
以下是导纳控制在机械臂控制中的主要优势:
| 优势 | 描述 |
|---|
| 柔顺性 | 通过力-位置映射实现柔顺控制,适应外部力的作用。 |
| 安全性 | 在人机协作中,通过导纳控制避免机械臂对操作者造成伤害。 |
| 适应性 | 在未知环境中,通过动态响应调节实现自适应运动。 |
| 精确性 | 在力控操作中,通过导纳控制实现高精度的力控制。 |
导纳控制的核心公式
导纳控制的核心公式如下:
$$
F = M \ddot{x} + D \dot{x} + K x
$$
其中:
- $F$:外部力。
- $M$:虚拟质量。
- $D$:虚拟阻尼。
- $K$:虚拟刚度。
- $x$:位置偏差。
通过调整 $M$、$D$、$K$ 参数,可以控制机械臂的动态响应特性。
导纳控制与阻抗控制的对比
以下是导纳控制与阻抗控制的对比:
| 特性 | 导纳控制 | 阻抗控制 |
|---|
| 控制对象 | 位置或速度 | 力 |
| 适用场景 | 需要柔顺性和安全性的场景(如人机协作)。 | 需要精确力控制的场景(如装配、打磨)。 |
| 动态响应 | 通过调整导纳参数实现动态响应调节。 | 通过调整阻抗参数实现动态响应调节。 |
| 实现复杂度 | 相对简单,适合实时控制。 | 相对复杂,需要高精度力传感器。 |
- 导纳控制 是一种基于力-位置关系的控制方法,广泛应用于机械臂的柔顺控制和人机交互场景。
- 通过调整导纳参数,可以实现机械臂的动态响应调节,提高其柔顺性、安全性和适应性。
- 导纳控制在力控操作和人机协作中表现出显著优势,是机械臂控制的重要技术之一。
实操结果
::: tip pybullet
具备一定抗扰能力
:::
作业
::: col 部分代码
class TorqueAdmittanceController:
def __init__(self, j, b, k, dt):
self.J = j # 虚拟转动惯量
self.B = b # 虚拟阻尼
self.K = k # 虚拟刚度
self.dt = dt # 时间步长
# 状态变量
self.theta = 0.0 # 角度偏差
self.dtheta = 0.0 # 角速度
self.ddtheta = 0.0 # 角加速度
def update(self, measured_torque, desired_angle):
# 导纳控制方程:tau = J * ddtheta + B * dtheta + K * theta
# 求解 ddtheta
self.ddtheta = (measured_torque - self.B * self.dtheta - self.K * self.theta) / self.J
# 更新状态
self.dtheta += self.ddtheta * self.dt
self.theta += self.dtheta * self.dt
# 计算目标角度(期望角度 + 偏差)
target_angle = desired_angle + self.theta
return target_angle
运行结果

:::
MPC与WBC在双足机器人控制中的应用与优势
MPC与WBC算法简介
MPC(Model Predictive Control,模型预测控制)
MPC 是一种基于模型的最优控制方法,通过预测未来一段时间内的系统行为,优化当前控制输入。其核心特点包括:
- 预测模型:利用系统动力学模型预测未来状态。
- 滚动优化:在每个控制周期内求解优化问题,生成最优控制输入。
- 反馈校正:通过实时反馈校正预测误差,提高控制精度。
WBC(Whole-Body Control,全身控制)
WBC 是一种基于优化算法的控制方法,通过协调机器人全身关节的运动,实现复杂任务(如行走、平衡)。其核心特点包括:
- 任务优先级:将任务分为高优先级(如平衡)和低优先级(如姿态调整),通过优化实现任务协调。
- 动力学约束:考虑机器人动力学约束(如关节力矩限制),确保控制输入的可行性。
- 实时性:通过高效求解器实现实时控制。
MPC与WBC在双足机器人控制中的应用
MPC的应用
- 步态生成:通过预测未来状态,生成稳定的步态轨迹。
- 平衡控制:在外部扰动下,通过滚动优化实现动态平衡。
- 路径跟踪:在复杂环境中,通过MPC实现精确的路径跟踪。
WBC的应用
- 全身协调:通过任务优先级和动力学约束,实现全身关节的协调运动。
- 复杂任务:支持多任务并行(如行走、抓取、避障),提高机器人灵活性。
- 实时控制:通过高效求解器实现实时全身控制。
MPC与WBC的对比与优势
以下是MPC与WBC在双足机器人控制中的对比与优势总结:
| 特性 | MPC | WBC |
|---|
| 核心思想 | 基于模型预测和滚动优化,实现最优控制。 | 基于任务优先级和动力学约束,实现全身协调控制。 |
| 适用场景 | 步态生成、平衡控制、路径跟踪。 | 全身协调、复杂任务、实时控制。 |
| 计算复杂度 | 较高,需在线求解优化问题。 | 较高,但可通过高效求解器实现实时控制。 |
| 优势 | - 预测未来状态,提高控制精度<br>- 适应动态环境变化 | - 支持多任务并行<br>- 考虑全身动力学约束 |
使用Webots进行算法可视化结果的优势
Webots 是一款开源的机器人仿真平台,支持多种机器人模型和传感器仿真。使用Webots进行MPC和WBC算法可视化结果的优势包括:
| 优势 | 描述 |
|---|
| 快速验证 | 通过仿真快速验证算法性能,减少硬件调试时间。 |
| 可视化调试 | 提供丰富的可视化工具,便于分析算法效果和问题定位。 |
| 多场景支持 | 支持多种环境(如室内、室外、复杂地形),验证算法的鲁棒性。 |
| 低成本 | 无需硬件设备,降低开发成本。 |
| 可扩展性 | 支持自定义机器人模型和控制算法,便于扩展和二次开发。 |
- MPC 和 WBC 是双足机器人控制中的两种重要算法,分别适用于步态生成、平衡控制和全身协调任务。
- Webots 提供了强大的仿真和可视化功能,能够显著提高算法开发和调试的效率。
- 通过仿真验证和可视化分析,可以快速优化算法性能,为实际硬件部署奠定基础。
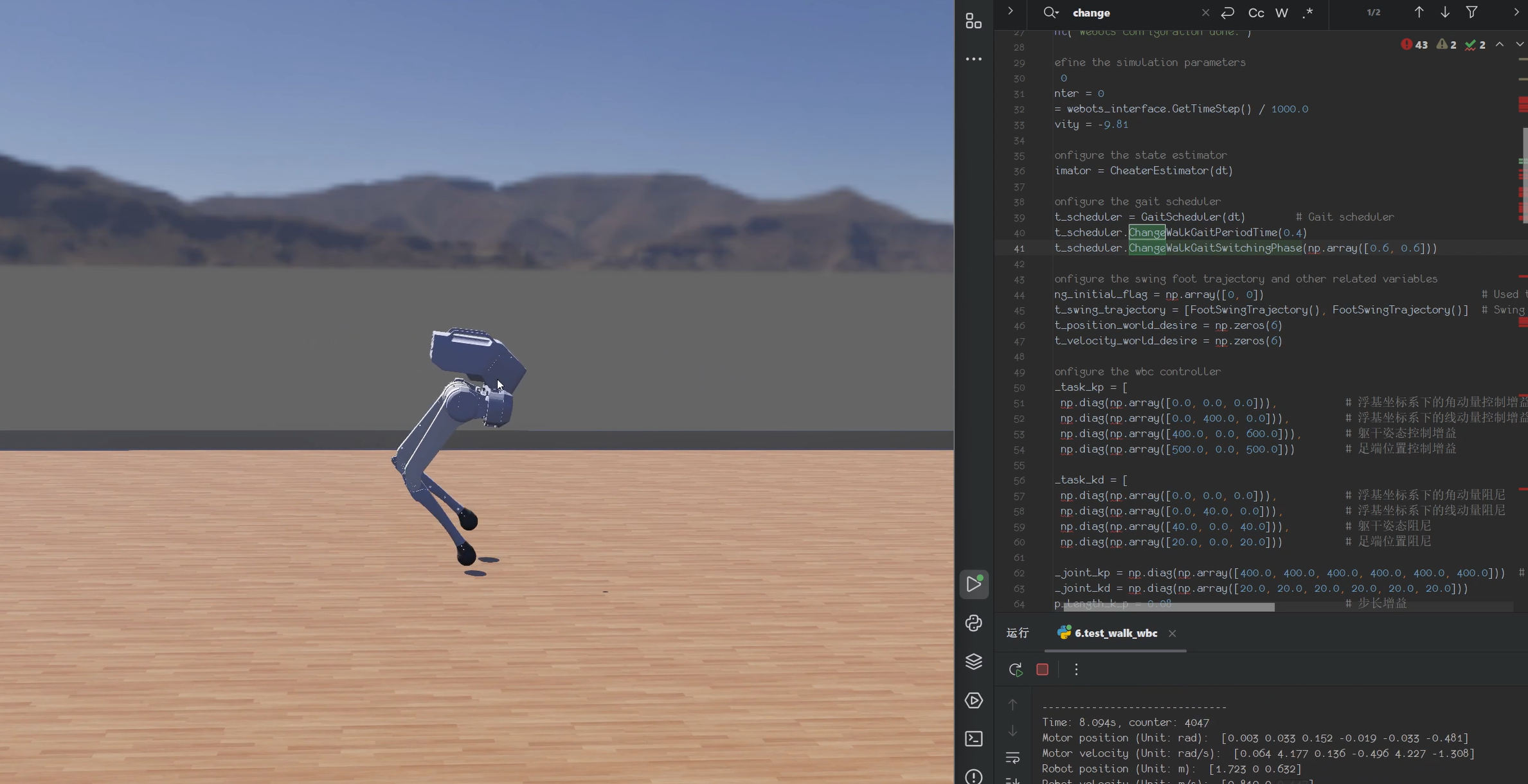
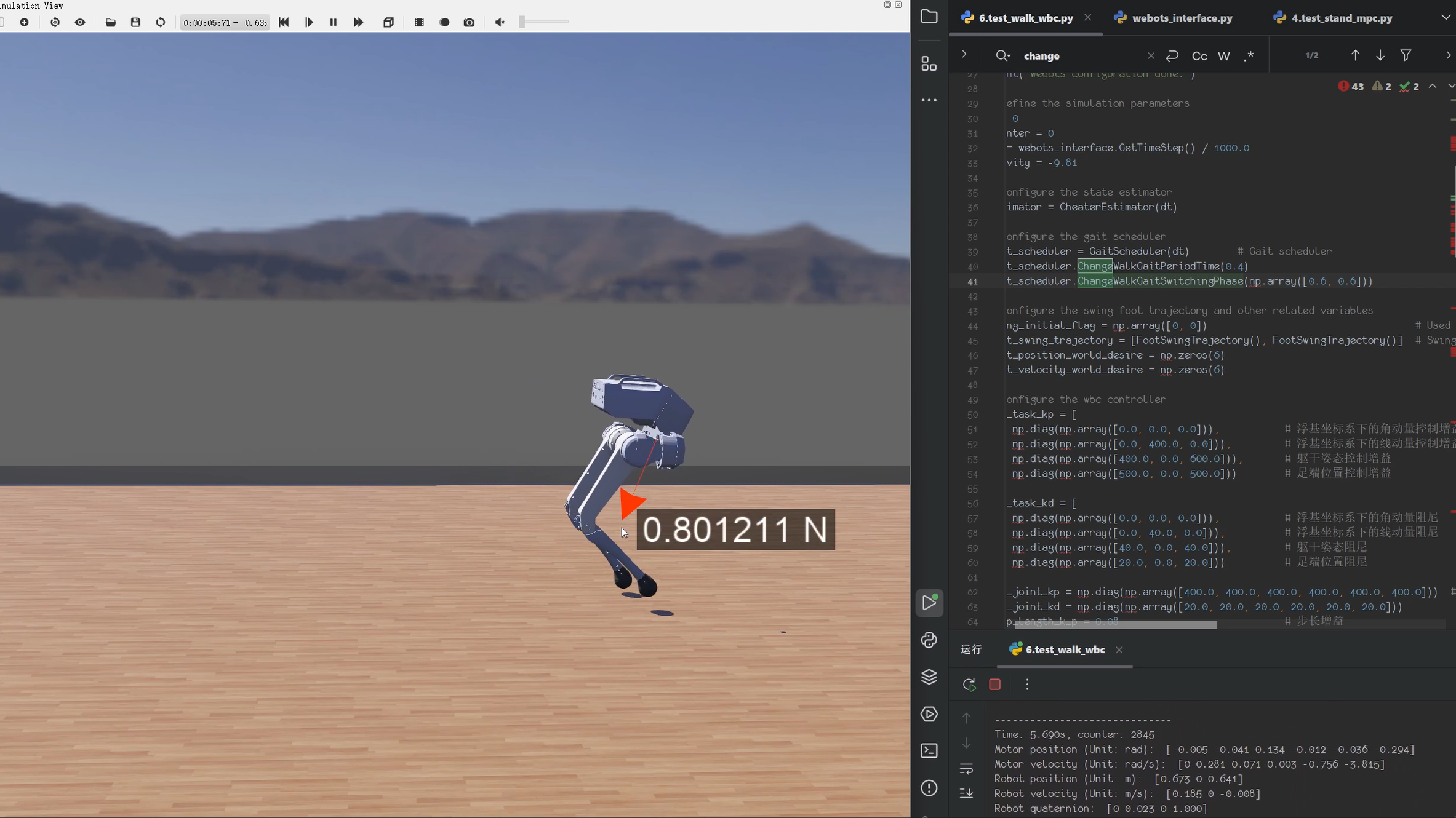
实操过程
::: col
下载webots安装包。注意版本需要是 R2021a:https://github.com/cyberbotics/webots/releases
||
|-|
|新建环境变量 ==WEBOTS_HOME==,变量值为 Webots 安装的文件夹,例如此处是 E 盘的 Webots 文件夹 E:\Webots|
|新建环境变量 ==PYTHONPATH==,变量值为 %WEBOTS_HOME%\lib\controller\python39|
|将路径 %WEBOTS_HOME%\lib\controller 添加到 ==PATH== 环境变量中|
打开 ==Windows Powershell==,使用下列命令进行验证,确保环境变量正确配置
注意不是CMD, 而是Powershell,因为Powershell权限会更高
echo $env:WEBOTS_HOME
echo $env:PYTHONPATH
$env:Path -split ';' | Select-String "webots"
配置环境
conda create -n MPC-WBC-Python-Demo python=3.9.18
conda activate MPC-WBC-Python-Demo
conda install pinocchio=3.3.1 -c https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/conda-forge/
conda install cvxopt=1.3.0 -c https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main
conda install matplotlib=3.9.2 -c https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/mai
:::
::: col 关键参数分享
# Configure the gait scheduler
gait_scheduler = GaitScheduler(dt) # Gait scheduler
gait_scheduler.ChangeWalkGaitPeriodTime(0.4)
gait_scheduler.ChangeWalkGaitSwitchingPhase(np.array([0.6, 0.6]))
Configure the swing foot trajectory and other related variables
swing_initial_flag = np.array([0, 0]) # Used to determine whether the swing phase is just entered
foot_swing_trajectory = [FootSwingTrajectory(), FootSwingTrajectory()] # Swing foot trajectory generators, they are independent of each other
foot_position_world_desire = np.zeros(6) # Swing foot expected trajectory
foot_velocity_world_desire = np.zeros(6)
Configure the wbc controller
wbc_task_kp = [
np.diag(np.array([0.0, 0.0, 0.0])), # 浮基坐标系下的角动量控制增益
np.diag(np.array([0.0, 400.0, 0.0])), # 浮基坐标系下的线动量控制增益
np.diag(np.array([400.0, 0.0, 600.0])), # 躯干姿态控制增益
np.diag(np.array([500.0, 0.0, 500.0])) # 足端位置控制增益
]
wbc_task_kd = [
np.diag(np.array([0.0, 0.0, 0.0])), # 浮基坐标系下的角动量阻尼
np.diag(np.array([0.0, 40.0, 0.0])), # 浮基坐标系下的线动量阻尼
np.diag(np.array([40.0, 0.0, 40.0])), # 躯干姿态阻尼
np.diag(np.array([20.0, 0.0, 20.0])) # 足端位置阻尼
]
wbc_joint_kp = np.diag(np.array([400.0, 400.0, 400.0, 400.0, 400.0, 400.0])) # 关节位置控制增益
wbc_joint_kd = np.diag(np.array([20.0, 20.0, 20.0, 20.0, 20.0, 20.0])) # 关节速度阻尼
step_length_k_p = 0.08 # 步长增益
wbc_controller = WBCController(wbc_task_kp, wbc_task_kd, wbc_joint_kp, wbc_joint_kd)
:::
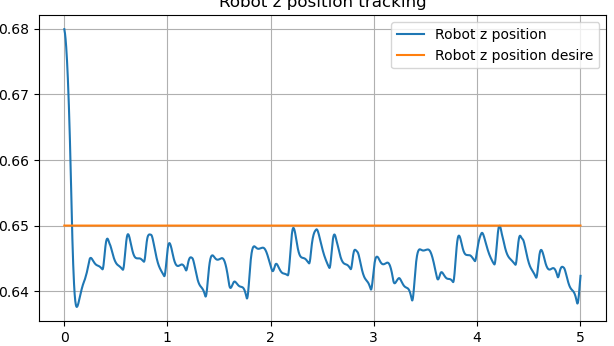
::: tip 实现效果
||||
|-|-|-|
||||
|||
|-|-|
|||
:::


